AWS released the open-source Strands Robots SDK on June 18, 2026, an Apache 2.0-licensed toolkit that bridges Hugging Face Hub demonstration datasets to physical robot hardware via Strands Agents and the LeRobot robot learning stack.
The SDK unifies previously siloed robot learning workflows into a single composable agent loop that routes context and model calls to supported LLM providers, a pattern documented in modern agentic AI tooling GitHub’s guide to agentic context handling and model routing.
Full source code for the SDK is publicly available in the strands-labs/robots GitHub repository under the project’s official Amazon organization AWS’s official Strands Robots SDK announcement.
Strands Robots SDK unifies Hugging Face Hub and LeRobot workflows
The SDK’s design is intentionally minimal: it does not rebuild or reimplement LeRobot’s core functionality. Instead, it wraps LeRobot’s native lerobot-record and lerobot-calibrate command-line interfaces (CLIs) for hardware bring-up and data collection. This approach preserves full compatibility with existing LeRobot workflows and datasets already in use by the global robotics community AWS’s official Strands Robots SDK announcement.
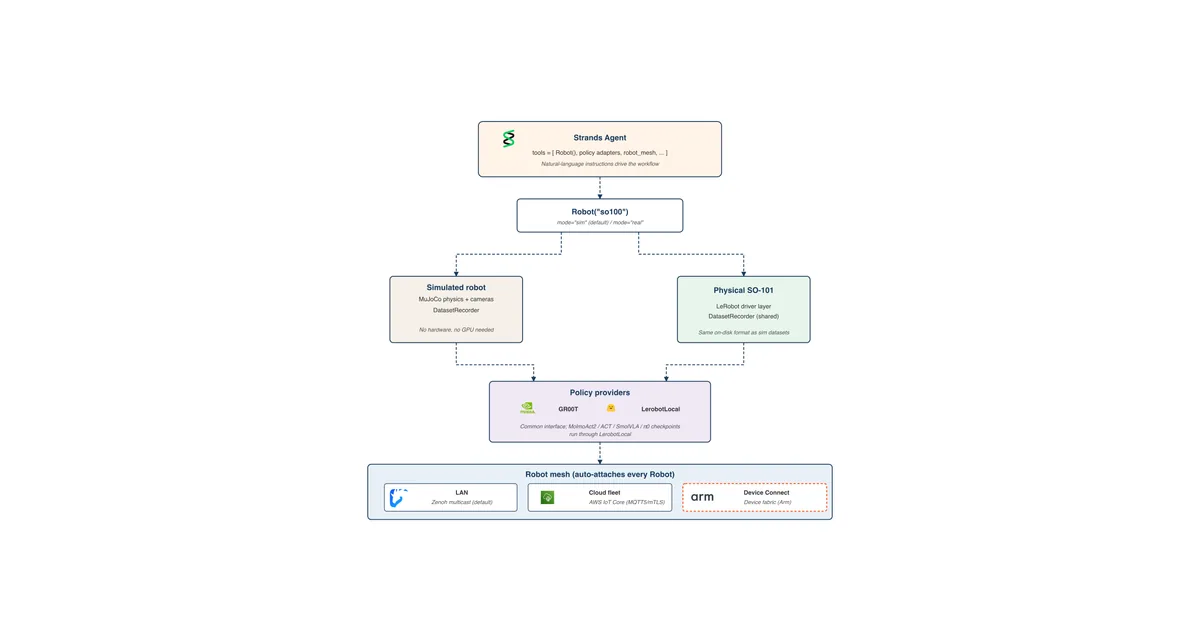
The simulation tool included with the SDK records LeRobotDatasets in the exact same on-disk format that LeRobot uses for physical hardware data. As a result, datasets captured in MuJoCo simulation are directly interchangeable with those captured from a physical SO-101 arm.
The example agent shipped with the SDK handles four distinct end-to-end tasks: recording new demonstrations in simulation, pushing the resulting LeRobotDataset to the Hugging Face Hub, running a trained policy in simulation against the same dataset format, and deploying the identical agent code to physical hardware with only a single mode="real" keyword argument change AWS’s official Strands Robots SDK announcement.
This shared format simplifies sim-to-real transfer, as developers can train policies on large-scale simulated demonstrations pulled from the Hugging Face Hub and validate them on physical hardware without reformatting or re-processing data. A June 2026 arXiv study found this workflow reduces transfer overhead for robot learning projects arXiv study on sim-to-real transfer overhead reduction.
The SDK’s default mock policy testing path requires no Hugging Face credentials, no connected robot hardware, and no dedicated GPU. This lets developers validate end-to-end workflows on a standard consumer laptop before investing in physical hardware AWS’s official Strands Robots SDK announcement.
Minimal setup for simulation and optional hardware deployment
The default simulation path requires only Python 3.12 or later, running on Linux, macOS, or Apple Silicon hardware. It supports one of four large language model (LLM) providers for agent reasoning: Amazon Bedrock with valid AWS credentials, the Anthropic API, OpenAI, or a locally running Ollama instance. The full Strands Robots install for simulation use uses the single command uv pip install "strands-robots[sim-mujoco,lerobot,mesh]". This command pulls all required dependencies for MuJoCo simulation, LeRobot integration, and 3D mesh rendering in one step AWS’s official Strands Robots SDK announcement.
The complete runnable example is hosted in the public strands-labs/robots GitHub repository at the exact paths examples/lerobot/hub_to_hardware.py and the companion hub_to_hardware.ipynb notebook. The end-to-end example runs on a consumer laptop with no connected robot hardware, no dedicated GPU, and no Hugging Face credentials required for the default mock policy testing path. This lowers the barrier to entry for new robotics developers AWS’s official Strands Robots SDK announcement.
The companion Jupyter notebook is pre-configured for simulation-only use with a mock policy by default. This makes it accessible to developers who do not have access to physical robot hardware or Hub write permissions for initial testing.
For physical hardware deployment, users must have either a matched SO-101 follower and leader arm set (the reference robot for the LeRobot ecosystem) or any other robot model officially supported by the LeRobot project. Pre-calibrated calibration files must be saved to the ~/.cache/huggingface/lerobot/calibration/ directory AWS’s official Strands Robots SDK announcement.
Users also need a Hugging Face account with write access to push recorded datasets to the Hub or download pre-trained policy checkpoints. Local GR00T inference, used for on-robot policy execution, requires an NVIDIA GPU with a minimum of 16GB of VRAM and Docker installed AWS’s official Strands Robots SDK announcement.
The SDK’s built-in gr00t_inference tool automates pulling the required container image, downloading model checkpoints, and starting the inference service in a single function call. This removes the need for manual container configuration. Released under the permissive Apache 2.0 license, the SDK can be used for commercial and research projects without royalty obligations.
Full source code is available in the public strands-labs/robots GitHub repository for community contributions and forking AWS’s official Strands Robots SDK announcement.
Fleet coordination and cross-compatible policy support
For multi-robot deployments, the SDK includes a built-in peer-to-peer mesh network powered by Zenoh. This lets a single agent broadcast commands across a fleet of remote robots without requiring developers to write custom networking code. Policy inference is abstracted behind a common, unified interface that supports both GR00T checkpoints and the LerobotLocal local inference path. This lets teams deploy different policy architectures to the same fleet without rewriting agent logic AWS’s official Strands Robots SDK announcement.
Developers can swap between different trained policies by changing only a single string parameter in their agent code, with no modifications needed to the rest of their workflow. For example, the Allen AI MolMoMotion 7B parameter open-source motion model, released in June 2026, is compatible with the SDK’s unified inference interface. This lets teams swap between GR00T and MolMoMotion policies with a single configuration change Allen AI’s MolMoMotion 7B model announcement.
What are the minimum system requirements for Strands Robots SDK simulation mode?
The default simulation path requires Python 3.12 or later, running on Linux, macOS, or Apple Silicon hardware. No dedicated GPU, connected robot hardware, or Hugging Face credentials are required for the default mock policy testing path, per AWS’s official documentation.
Can I use the Strands Robots SDK with my existing LeRobot datasets?
Yes. The SDK does not reimplement LeRobot’s core functionality, instead wrapping LeRobot’s native lerobot-record and lerobot-calibrate CLIs. It records LeRobotDatasets in the exact same on-disk format as physical hardware data, so existing LeRobot datasets are fully compatible without reformatting.
What robot hardware is supported by the Strands Robots SDK?
For physical deployment, the SDK supports the SO-101 follower and leader arm set (the reference hardware for the LeRobot ecosystem) and any other robot model officially supported by the LeRobot project. Pre-calibrated calibration files must be saved to the ~/.cache/huggingface/lerobot/calibration/ directory.
Is the Strands Robots SDK free for commercial use?
Yes. The SDK is released under the permissive Apache 2.0 license, which allows unrestricted use for commercial and research projects without royalty obligations. Full source code is publicly available in the strands-labs/robots GitHub repository for community contributions and forking.
Bottom line: AWS’s open-source Strands Robots SDK provides a unified, Apache 2.0-licensed framework that wraps existing LeRobot tooling and Hugging Face Hub dataset workflows into composable AgentTools. This lets developers run identical code for simulation and physical SO-101 robot hardware with only a single mode="real" keyword argument change, with no data reformatting required between simulation and real-world deployment.
The SDK is available now for free via uv pip install "strands-robots[sim-mujoco,lerobot,mesh]" with full source code in the public strands-labs/robots GitHub repository AWS’s official Strands Robots SDK announcement.